Tudo que Fernando postou
-
 Resistores fixosPodemos dividir os componentes eletrônicos em dois grandes grupos: componentes ativos e componentes passivos. Os resistores pertencem ao grupo de componentes passivos, juntamente com outros, como capacitores, bobinas e indutores. Como vimos nas seções anteriores, os resistores são representados com alguns dos símbolos na imagem a seguir. Os resistores são numerosos em circuitos eletrônicos e sua principal função é causar quedas de tensão em determinadas seções com o objetivo de reduzir a corrente que circula por aquela seção. Resistores fixos têm um valor ôhmico que não pode ser alterado e podem ser de dois tipos: carbono e metal . Resistores de carbono possuem uma base cilíndrica de material vitrocerâmico com uma camada de carbono depositada em sua superfície. Possuem diversas aplicações em eletrônica devido ao seu desempenho e baixo índice de ruído. Resistores metálicos são fabricados em metal, óxido metálico ou ligas metálicas. Existem três tipos: camada metálica, filme metálico e fio enrolado. Características técnicas geraisCada um desses resistores possui uma série de características técnicas que os definem. São elas: Resistência nominal: é o valor teórico que se espera que o resistor tenha após a conclusão do processo de fabricação. Tolerância: Esta informação nos diz em que porcentagem o valor da resistência pode variar (para cima ou para baixo) em relação ao seu valor nominal. Potência nominal: é a potência em watts (W) que o componente pode dissipar continuamente sem deterioração. O tamanho do resistor é diretamente proporcional a esse valor de potência. Tanto a resistência quanto a tolerância são indicadas por um código de cores lido da esquerda para a direita. Esse código de cores é exibido no corpo do resistor por meio de faixas, cada uma correspondendo a um valor numérico determinado pelo código de cores do resistor. Os resistores geralmente têm três códigos de cores juntos e um separado (veja a imagem). As três faixas juntas representam o valor ôhmico e a faixa separada indica a tolerância. ExemploQual é o valor do resistor na figura e sua tolerância? Abaixo estão alguns exercícios que permitirão que você se familiarize com o uso e a interpretação da tabela e dos códigos de cores. Exercício 1Determine o valor do resistor e da tolerância na imagem a seguir: Exercício 2Determine o valor do resistor e da tolerância na imagem a seguir: Exercício 3Determine o valor do resistor e da tolerância na imagem a seguir:
Resistores fixosPodemos dividir os componentes eletrônicos em dois grandes grupos: componentes ativos e componentes passivos. Os resistores pertencem ao grupo de componentes passivos, juntamente com outros, como capacitores, bobinas e indutores. Como vimos nas seções anteriores, os resistores são representados com alguns dos símbolos na imagem a seguir. Os resistores são numerosos em circuitos eletrônicos e sua principal função é causar quedas de tensão em determinadas seções com o objetivo de reduzir a corrente que circula por aquela seção. Resistores fixos têm um valor ôhmico que não pode ser alterado e podem ser de dois tipos: carbono e metal . Resistores de carbono possuem uma base cilíndrica de material vitrocerâmico com uma camada de carbono depositada em sua superfície. Possuem diversas aplicações em eletrônica devido ao seu desempenho e baixo índice de ruído. Resistores metálicos são fabricados em metal, óxido metálico ou ligas metálicas. Existem três tipos: camada metálica, filme metálico e fio enrolado. Características técnicas geraisCada um desses resistores possui uma série de características técnicas que os definem. São elas: Resistência nominal: é o valor teórico que se espera que o resistor tenha após a conclusão do processo de fabricação. Tolerância: Esta informação nos diz em que porcentagem o valor da resistência pode variar (para cima ou para baixo) em relação ao seu valor nominal. Potência nominal: é a potência em watts (W) que o componente pode dissipar continuamente sem deterioração. O tamanho do resistor é diretamente proporcional a esse valor de potência. Tanto a resistência quanto a tolerância são indicadas por um código de cores lido da esquerda para a direita. Esse código de cores é exibido no corpo do resistor por meio de faixas, cada uma correspondendo a um valor numérico determinado pelo código de cores do resistor. Os resistores geralmente têm três códigos de cores juntos e um separado (veja a imagem). As três faixas juntas representam o valor ôhmico e a faixa separada indica a tolerância. ExemploQual é o valor do resistor na figura e sua tolerância? Abaixo estão alguns exercícios que permitirão que você se familiarize com o uso e a interpretação da tabela e dos códigos de cores. Exercício 1Determine o valor do resistor e da tolerância na imagem a seguir: Exercício 2Determine o valor do resistor e da tolerância na imagem a seguir: Exercício 3Determine o valor do resistor e da tolerância na imagem a seguir: -
11. DatasheetDocumento técnico do fabricante. Contém pinagem, limites elétricos, curvas de operação. Fundamental para substituição de componentes em reparo. Um datasheet (ou folha de dados) é um documento técnico elaborado pelo fabricante que reúne, em detalhes claros, todas as características técnicas de um componente eletrônico. Ele guia projetistas na correta integração do componente em seus circuitos ou sistemas.DigiKey+8Wikipedia+8TimelyText | Expert Writing Services+8Wikipédia+1 Principais informações contidas no datasheetPinagem e conexões: Diagramas de pinout que mostram as funções de cada terminal. Essenciais tanto para ICs complexos quanto para componentes simples.DigiKey+2Instructables+2 Valores absolutos máximos (Absolute Maximum Ratings): Limites que não devem ser ultrapassados sob risco de danificar permanentemente o componente. Importante: esses valores não são para operação contínua.Wikipédia+5Electrical Engineering Stack Exchange+5Dominion Electric Supply+5 Condições recomendadas de operação: Faixas seguras onde o componente opera com confiabilidade. Mantê-las garante durabilidade e desempenho estável.DigiKeyDominion Electric Supply Parâmetros elétricos: Correntes, tensões, níveis lógicos, consumo, etc.—essenciais para cálculo de alimentação, compatibilidade e funcionamento correto.Wikipédia Curvas e gráficos: Exemplos incluem variação de corrente com temperatura, eficiência, tempos de resposta. Eles complementam os dados tabulares com informações de comportamento contínuo.Wikipédia Características mecânicas e de encapsulamento: Dimensões, formatos de embalagem, tolerâncias de fabricação, cruciais na fase de layout e produção.Wikipédia+1 Descrição funcional e aplicações típicas: Breve explicação e sugestões de uso do componente, frequentemente apresentadas na introdução ou em notas de aplicação.Wikipedia+1 Histórico de revisões e erratas: Importante para identificar atualizações ou correções — manter-se na versão correta evita erros de projeto ou falhas inesperadas.Wikipédia+1 Por que o datasheet é indispensável?“O datasheet é a sua enciclopédia completa sobre o componente.”—é ali que se encontra tudo que você precisa para usar o componente corretamente.embeddedrelated.com+9Electrical Engineering Stack Exchange+9Dominion Electric Supply+9 Ele serve como um ponto de referência técnico-legítimo, não uma propaganda: deve ser informativo e confiável, escrito para profissionais de engenharia.allegromicro.com Como utilizar o datasheet na prática?Comece pelos valores absolutos máximos — nunca opere além disso. Confira as condições recomendadas de operação — é onde é seguro usar o componente. Entenda a pinagem para ligação correta no circuito. Consulte especificações elétricas como corrente permitida e níveis de tensão. Analise gráficos de desempenho para entender comportamento em diferentes condições. Consulte dimensões físicas e recomendações de layout para montagem correta. Verifique o histórico de versões, buscando por erratas ou melhorias importantes. Resumo comparativoItem no Datasheet Importância Pinagem Define como conectar corretamente o componente Absolute Maximum Ratings Evita danos permanentes por operação fora dos limites Recommended Operating Conditions Garante uso confiável e estável Especificações elétricas Ajuda no dimensionamento de correntes, tensões e alimentação Gráficos (curvas de desempenho) Mostra comportamento em diferentes condições reais Dimensões e encapsulamento Essencial para layout físico e seleção apropriada Descrição funcional Auxilia no entendimento do propósito e aplicação Histórico de revisões/erratas Evita o uso de informações desatualizadas ou incorretas
-
10. Cristal Oscilador (Clock)Gera frequência para o processador. É o “coração” da ECU: sem clock, o processador não trabalha. O cristal oscilador, também conhecido como clock, é um componente fundamental em qualquer central eletrônica. Ele é fabricado com um material que possui uma frequência natural de oscilação, utilizada pelo processador para definir o tempo de execução das rotinas internas. Em outras palavras, o clock funciona como um ritmador, garantindo que todas as operações ocorram em sincronia. Quanto mais moderna é a ECU, maior tende a ser a frequência do clock, o que permite maior capacidade de processamento e precisão nos cálculos. Defeitos comuns – causas e efeitosCausas possíveis: Desgaste natural ao longo do tempo; Oxidação nos terminais; Mau contato em soldas ou rompimento de trilhas; Curto-circuito externo; Sobrecarga elétrica, geralmente causada por falta de aterramento nos componentes externos. Efeitos observados: Falta de alimentação ou aterramento em determinados sensores; Atuadores deixam de funcionar corretamente; Em casos mais graves, a central deixa de funcionar por completo. Soluções recomendadasIdentificar a causa do defeito por meio de inspeção visual e testes elétricos; Refazer soldas defeituosas ou ressoldar os terminais do cristal; Reconstruir trilhas danificadas utilizando fio encapado, quando necessário.
-
9. MemóriasEPROM: mapas fixos de injeção. EEPROM (ex.: 95160): dados do imobilizador e códigos de chaves. RAM: dados temporários, volátil. Flash: usada em reprogramações modernas. É o nosso processador, MCU. As memórias são componentes fundamentais das ECUs, pois armazenam desde os mapas de injeção até informações de segurança, parâmetros de funcionamento e dados temporários. Principais tipos de memória:EPROM (Erasable Programmable Read-Only Memory): Contém os mapas fixos de injeção. É programável, mas não permite gravações frequentes. EEPROM (ex.: 95160): Armazena dados do imobilizador e códigos das chaves. Pode ser regravada diversas vezes, sendo utilizada em ajustes e personalizações. RAM (Random Access Memory): Memória volátil, usada para armazenar dados temporários enquanto a ECU está ligada. Ao desligar, seus dados são apagados. Flash: Utilizada nas reprogramações modernas. Está integrada ao processador (MCU) e permite a atualização de softwares e mapas de injeção sem a necessidade de troca física do chip. Encapsulamentos e aplicações:As memórias podem ser encontradas em diferentes modelos de encapsulamento: DIP, PLCC, PSOP ou integradas diretamente no processador, principalmente nas ECUs híbridas. Elas carregam as informações essenciais para o funcionamento do motor, como: Avanço da ignição; Tempo de injeção; Controle de temperatura; Estratégias de funcionamento. Programação:A programação pode ser realizada de duas formas: Substituição do chip por outro já programado; Reprogramação direta com o auxílio de equipamentos especializados de leitura e gravação.
-
8. Circuitos Integrados (CI) ou DriveContêm milhares de componentes em um chip. Funções em ECU: microcontrolador, drivers, memórias, decodificadores. Geralmente trabalham com 5V, reebem um pulso +5v ou acoplamento +5v do proessador, e dispara um pulso ou acoplamento invertido negativo. Os drives são componentes eletrônicos responsáveis por realizar o acionamento dos bicos injetores, bobinas de ignição e solenoides. Eles atuam como etapas de potência, recebendo um sinal elétrico de baixa potência do processador da central e convertendo-o em um comando capaz de energizar diretamente esses atuadores. Características principais:O funcionamento e os detalhes construtivos podem ser consultados no datasheet de cada drive; O drive da bobina de ignição é um dos que mais apresenta defeitos, normalmente entrando em curto-circuito quando a bobina está com problema; Estruturalmente, o drive é formado por um transistor de potência, que pode ser: Montado individualmente no circuito; Integrado em um CI (Circuito Integrado), onde estão presentes vários transistores e circuitos de proteção internos. Importância:Sem os drives, a central não conseguiria acionar diretamente os atuadores do motor, pois o processador não é capaz de fornecer a corrente necessária. Por isso, eles funcionam como uma ponte entre a lógica de controle e os dispositivos de potência do sistema de injeção.
-
7. TransistoresFunção: chave ou amplificador. Tipos: Bipolar (NPN/PNP), MOSFET, Darlington. Na ECU: acionam injetores, bobinas e válvulas. Teste: multímetro em escala de diodo, verificar condução entre base, coletor e emissor. Os transistores de baixa potência são amplamente utilizados nos módulos de injeção eletrônica para o chaveamento dos drives e para a comunicação dos sinais digitais processados pelo microcontrolador. A principal função do transistor é controlar circuitos elétricos de maior potência utilizando um sinal de baixa potência. Dessa forma, ele atua como um amplificador de corrente, permitindo que pequenos sinais lógicos possam acionar cargas maiores. Comparação:Seu funcionamento é semelhante ao de um relé, pois ambos chaveiam circuitos; Entretanto, o transistor executa essa tarefa de forma mais rápida, precisa e eficiente, sem partes mecânicas móveis. Principais aplicações em centrais automotivas:Chaveamento dos drives de saída; Atuação de bicos injetores; Comando de bobinas de ignição; Controle de solenoides e relés auxiliares. Assim, os transistores são peças fundamentais para a interface entre a lógica da ECU e os atuadores do motor, garantindo velocidade de resposta e confiabilidade.
-
6. Reguladores de Tensão ou VoltagemMantêm tensão estável (geralmente 5V ou 3,3V). Tipos: lineares (78XX, 79XX) e chaveados. 🔧 Exemplo aplicado: Regulador defeituoso → sensores recebem valores errados. Nos módulos de injeção eletrônica, a maioria dos circuitos internos opera em 5 volts. Para garantir esse fornecimento estável, o regulador de voltagem desempenha papel fundamental. Esse componente é responsável por reduzir e estabilizar a tensão de entrada, normalmente proveniente da bateria do veículo (12 V), para o nível adequado exigido pelos circuitos lógicos e sensores da central. Um mau funcionamento do regulador pode gerar falhas intermitentes, travamentos ou até a queima de componentes sensíveis, comprometendo todo o desempenho do sistema de injeção.
-
5. DiodosRetificador: conduz em um sentido. Zener: estabiliza tensão. SMD: miniaturizados, usados em ECUs modernas. Teste: multímetro em escala de diodo → deve conduzir em apenas um sentido. Nos diodos retificadores, quando ocorre uma sobretensão — ou seja, quando a tensão aplicada ultrapassa o limite suportado pelo componente — o diodo passa a conduzir corrente no sentido em que deveria bloquear. Esse fenômeno gera o mesmo efeito já citado anteriormente: o rompimento das trilhas de entrada da placa. A principal característica de um diodo é permitir a passagem da corrente elétrica em apenas um sentido e impedir no outro, evitando assim a ocorrência de curtos-circuitos e protegendo o circuito eletrônico.
-
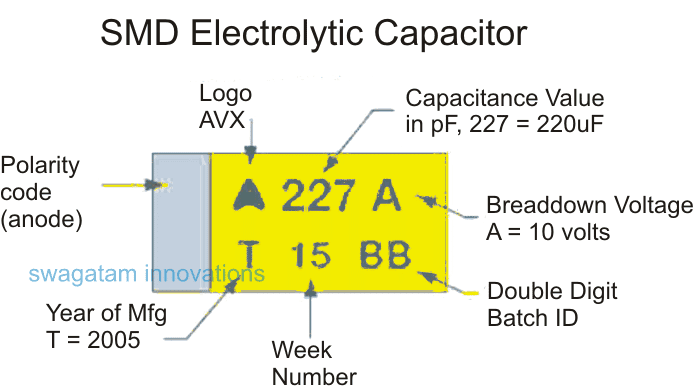
4. CapacitoresFunção: armazenar energia e filtrar ruídos. Tipos: Eletrolíticos: filtragem de fontes (polarizados). Cerâmicos: alta frequência e desacoplamento. Tântalo: alta capacitância em pouco espaço, usados em ECUs. 🔧 Exemplo aplicado: Um capacitor estufado pode causar reinício da ECU. 4.1🔹 Capacitor EletrolíticoArmazena energia e filtra ruídos. Nas ECUs, suaviza a alimentação antes e depois do regulador. Defeitos comuns: estufamento e vazamento → causam reinicialização da ECU. O capacitor eletrolítico é um dos principais elementos de filtragem presentes nas centrais eletrônicas automotivas. Sua função mais comum é filtrar a tensão de entrada e saída do regulador de voltagem, garantindo uma alimentação estável e reduzindo ruídos elétricos. Esse tipo de capacitor é construído com duas placas condutoras separadas por um dielétrico e imerso em uma substância eletrolítica (ácida). Com o tempo, esse eletrólito pode vazar, ocasionando curto-circuitos e corrosão das trilhas da placa. Principais aplicações:Filtragem em fontes de alimentação; Composição de circuitos oscilantes de baixa frequência; Acoplamento de sinais em baixa frequência; Utilização em circuitos temporizadores. Tipos de capacitores eletrolíticos:Metálicos (cilíndricos): os mais comuns, geralmente soldados na vertical; Epóxi (semelhantes a diodos): menos comuns, mas encontrados em alguns circuitos. A identificação costuma ser feita por um número (valor em microfarads, µF) e uma letra (tensão de trabalho). Exemplo: 22/16 → 22 µF / 16 V. Testes e medições:Para testar um capacitor eletrolítico é necessário: Conhecer previamente seu valor em µF; Selecionar a escala correta do multímetro ou capacímetro: Escala X1 ou X10 → de 330 µF até 10.000 µF; Escala X1K → de 0,05 µF até 220 µF. ⚠️ Atenção: os capacitores eletrolíticos possuem polaridade (+ e -), indicada em seu corpo, além do valor de tensão máxima de trabalho que não deve ser ultrapassada. abela de Identificação de Capacitores Eletrolíticos SMDElemento Descrição Valor fixo Ex.: "33 µF 6 V" → indica diretamente capacitância e tensão de trabalho. SABER 360°unopr.com.br Código (letra + 3 dígitos) Exemplo: G475, C475, J476. A letra representa a tensão de trabalho e os três dígitos representam o valor em pF (2 primeiros = algarismos significativos; último = multiplicador). newtoncbraga.com.brScribd Tensão por letra Tabela de códigos: e → 2,5 V G → 4,0 V J → 6,3 V A → 10 V C → 16 V D → 20 V E → 25 V V → 35 V H → 50 V unopr.com.br+11newtoncbraga.com.br+11Scribd+11Scribd | | Exemplo prático | C475 → letra C = 16 V; 475 → 47 × 10⁵ pF = 4,7 × 10⁶ pF = 4,7 µF × 16 V newtoncbraga.com.brScribd | | Outros formatos | Alguns SMD eletrolíticos ainda usam “valor + tensão” direto, como "470 µF 25 V" ou “33 µF 6 V” SABER 360°unopr.com.br | Interpretação passo a passoIdentifique o formato da marcação: se for um valor explícito (ex.: “33 µF 6 V”), a leitura é direta. Se for um código com letra + dígitos: Letra → tensão de trabalho conforme tabela. Dígitos: Dois primeiros → números significativos. Terceiro → multiplicador (nº de zeros em pF). Converta pF para µF (1 µF = 10⁶ pF). Verifique a polaridade: geralmente sinalizada com uma faixa (negativa) ou um símbolo "+"
-
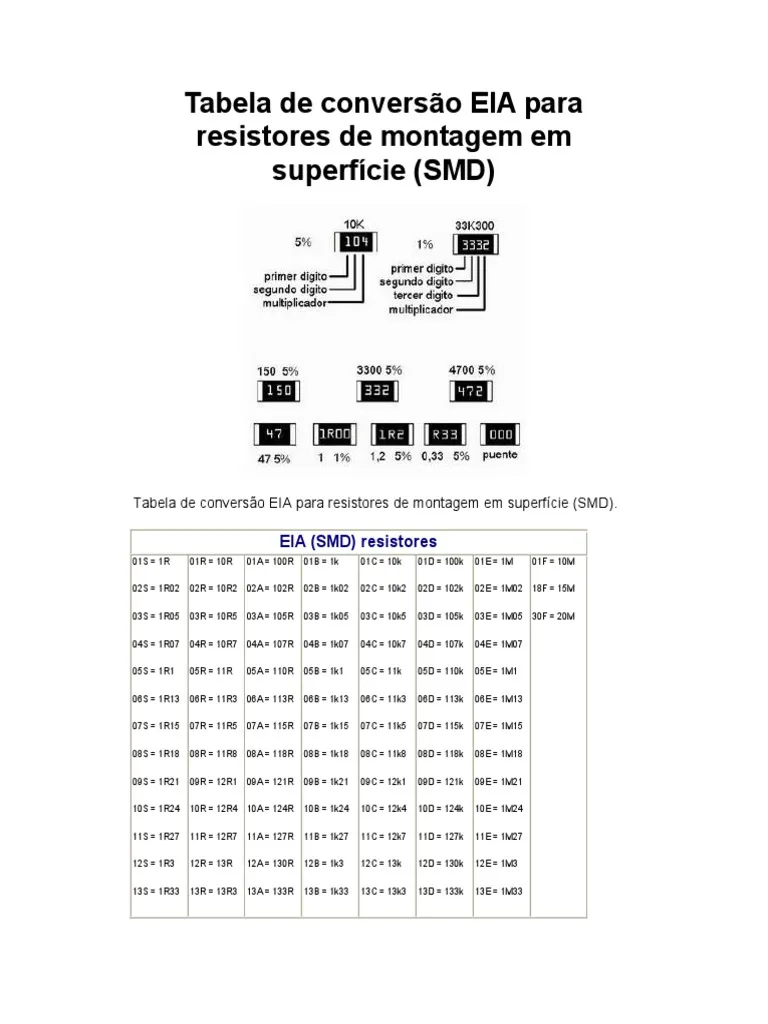
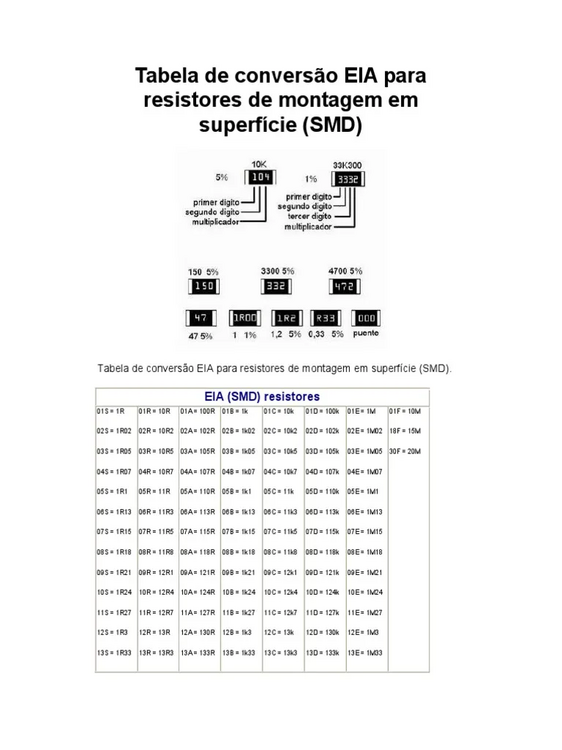
3. ResistoresFunção: limitar corrente, dividir tensão, definir pontos de polarização. Tipos: fixos, variáveis (potenciômetros, reostatos). Códigos: cores (axiais) ou numéricos (SMD). Resistor Shunt: resistência muito baixa usada para medir corrente. Redes resistivas: vários resistores em encapsulamento único (usadas em ECUs japonesas). Resistor SMDOs resistores SMD (Surface Mount Device) são componentes projetados para montagem em superfície, diferindo dos resistores convencionais pelo seu tamanho reduzido, chegando a ter 1/3 do tamanho de um resistor comum. Normalmente, eles são soldados no lado inferior da placa, junto às trilhas, o que permite um aproveitamento mais eficiente do espaço e maior miniaturização dos circuitos. CodificaçãoA identificação do valor de um resistor SMD é feita por meio de uma codificação numérica impressa em seu corpo: Pode ser de três ou quatro dígitos; Os mais comuns em equipamentos eletrônicos automotivos são os de três dígitos. Funcionamento da codificação (3 dígitos): Os dois primeiros números representam os dígitos significativos do valor; O terceiro número representa o fator de multiplicação (quantidade de zeros adicionados). 📌 Exemplo: Código 101 → “10” (dígitos significativos) + “1” (um zero) = 100 Ω; Código 102 → “10” + “2” (dois zeros) = 1000 Ω (1 kΩ). 🔍 Como interpretar os códigos de resistores SMD📌 Códigos de 3 dígitos (tolerância padrão, ±5%)Formato: XY Z Significado: Os dois primeiros dígitos (XY) representam os dígitos significativos, e o terceiro dígito (Z) é o multiplicador (número de zeros a serem adicionados). Exemplo: 472 → 47 × 10² = 4.700 Ω = 4,7 kΩ 📌 Códigos de 4 dígitos (maior precisão, ±1%)Formato: XYZ W Significado: Os três primeiros dígitos (XYZ) são os dígitos significativos, e o quarto dígito (W) é o multiplicador. Exemplo: 1001 → 100 × 10¹ = 1.000 Ω = 1 kΩ 📌 Códigos com a letra "R" (valores abaixo de 10 Ω)Significado: A letra "R" indica a posição da vírgula decimal. Exemplo: 4R7 → 4,7 Ω 📌 Códigos EIA-96 (tolerância de 1%)Formato: Dois dígitos seguidos por uma letra (ex: 12C) Significado: Os dois dígitos representam um valor padrão da série E96, e a letra indica o multiplicador. Exemplo: 12C → 1,21 × 10² = 121 Ω
-
ss
-
1. Fundamentos da EletricidadeLei de OhmGeorge Simon Ohm (1789–1854) comprovou que a corrente elétrica (I) que circula em um condutor é proporcional à tensão (V) aplicada e inversamente proporcional à sua resistência (R): V=R⋅IV = R \cdot IV=R⋅I V (Volts): diferença de potencial. I (Ampères): corrente elétrica. R (Ohms): resistência do material. 🔧 Exemplo aplicado: Em um injetor de combustível, se a resistência da bobina é 12Ω e a ECU aplica 12V, a corrente será de 1A.
-
1. Tabela de Símbolos e Grandezas da EletricidadeGrandeza Símbolo Unidade Corrente elétrica I Ampère (A) Tensão elétrica V Volt (V) Resistência elétrica R Ohm (Ω) Potência elétrica P Watt (W) Capacitância C Farad (F) Indutância L Henry (H) Frequência f Hertz (Hz)
-
Embora os microprocessadores tenham grande capacidade de processamento de dados e sejam muito úteis em uma ampla gama de aplicações, existem outras aplicações que não exigem tanta velocidade ou memória. A ideia do microcontrolador surgiu desse fato. Microcontroladores são dispositivos que, embora geralmente com desempenho inferior, integram CPU, ROM, RAM e uma interface de entrada/saída em um único chip, como um pequeno computador. Composição de um microcontrolador Uma das características mais importantes dos microcontroladores é a sua flexibilidade. Um único modelo pode ser usado para diversas aplicações, bastando alterar o programa de instruções. Devido às vantagens que oferecem, os microcontroladores estão presentes em um grande número de dispositivos eletrônicos de consumo atualmente. Dispositivos de controleElas têm nomes diferentes, como unidades de controle ou unidades de controle eletrônico (ECUs), entre outros. Esses controladores são usados para manter o veículo funcionando corretamente, controlando diversos parâmetros. A regulagem eletrônica foi usada inicialmente em veículos no sistema de ignição, mas posteriormente foi implementada em um número cada vez maior de sistemas, incluindo os sistemas de injeção de combustível de motores a diesel e a gasolina. Hoje, um grande número de unidades é usado para controlar os diferentes sistemas do veículo, tanto aqueles que afetam o funcionamento do motor quanto outros sistemas relacionados ao conforto ou à segurança dos passageiros. Visão de uma unidade de controle aberta Esses dispositivos de controle geralmente operam de acordo com o IPO , que significa Entrada - Processamento - Saída. Os sensores que já estudamos fornecem a entrada, registrando uma infinidade de grandezas físicas. Esses valores são comparados com a grandeza teórica inserida ou calculada pelo software da unidade. Se o valor real não corresponder ao valor teórico, a unidade regula, enviando sinais de saída para os atuadores, o processo físico correspondente até que os valores reais correspondam aos valores teóricos. Devido ao grande número de unidades atualmente utilizadas nos veículos para controlar todos os sistemas, as unidades de controle trocam informações por meio de diferentes barramentos de sistema (CAN). Graças a essa comunicação, diferentes sistemas podem ser controlados usando as informações compartilhadas de um único sensor. Isso evita a necessidade de duplicar sensores para informar todas as unidades de controle separadamente. Os veículos modernos podem ter mais de 60 unidades de controle, e esse número está em constante aumento.
-
Controladores programáveisA maioria dos dispositivos eletrônicos possui microprocessadores, que por sua vez constituem um controlador programável que atua como uma CPU. Para funcionar corretamente e realizar as operações para as quais foi projetado, ele requer outros elementos adicionais. Esses elementos são: Memória Unidade de entrada/saída Barramentos de sistema MemóriaDevido à limitação da memória que um microprocessador pode armazenar, em muitos casos, blocos de memória são necessários para armazenar dados e instruções de programas. Essa memória está fisicamente localizada fora do microprocessador e é composta por um ou mais chips montados em uma placa de circuito impresso. A unidade de medida comum para memória é o byte , que é um conjunto de oito bits. As unidades de medida variam dependendo se são utilizados os prefixos do Sistema Internacional SI ou da Comissão Eletrotécnica Internacional (CEI) . A relação entre essas unidades é: Tabela da relação entre o sistema internacional e a comissão eletrotécnica internacional Os prefixos SI são frequentemente usados para designar que 1 quilobyte é igual a 1.024 bytes, embora isso seja incorreto. Os prefixos SI são baseados na base 10, enquanto os prefixos IEC são baseados na base 2 . Dois tipos de memória são necessários para o funcionamento correto de um microprocessador: ROM e RAM . ROMEsta é a memória somente leitura, responsável por armazenar os dados do programa necessários para o funcionamento do microprocessador. Esses dados não devem ser apagados mesmo quando o sistema não estiver mais recebendo energia elétrica. Existem vários tipos de ROM, descritos abaixo. ROM : Permite que os dados sejam gravados por hardware, o que impede que os dados sejam modificados depois de terem sido gravados na memória. EPROM : É uma ROM que pode ser modificada, embora isso só possa ser feito expondo o material semicondutor à radiação ultravioleta. EEPROM : Oferece a possibilidade de apagar ou modificar o conteúdo gravado pelo usuário. Essa modificação é possível por meio de um circuito eletrônico. BATERTrata-se de uma memória de acesso aleatório (MRAM) usada para armazenar as informações que o microprocessador pode ler e gravar conforme necessário durante a execução de suas instruções programadas. Trata-se de uma memória para armazenamento temporário, e todos os dados são apagados quando a energia elétrica é interrompida. Os tipos de RAM são: SRAM : Também chamada de RAM estática, é uma memória que funciona muito rápido, mas só mantém dados enquanto recebe corrente elétrica. DRAM : Também chamada de RAM dinâmica, essa memória requer energia em determinados intervalos de tempo para manter as informações armazenadas. Ela funciona mais lentamente que a SRAM, mas seu custo mais baixo a torna viável para muitas aplicações. Unidade de entrada/saídaAs unidades de entrada/saída são circuitos integrados que se comunicam com os periféricos (sensores e atuadores em um veículo) que geram os sinais de entrada e recebem os sinais de saída. Conversores analógico-digitais (D/A ou DAC) e analógico-digitais (A/D ou ADC) são integrados a esses circuitos. Conversor digital-analógico (D/A)Consiste em converter um valor representado em código binário em uma tensão elétrica proporcional ao valor digital. Cada valor digital deve corresponder a um único valor de tensão. Por exemplo, se um conversor usa 3 bits para um valor máximo de tensão de 14 volts, a relação entre o valor binário e o sinal elétrico seria a seguinte: Tabela da relação entre a entrada digital e a saída analógica Conversor analógico-digital (A/D)Executa a função oposta do conversor D/A, convertendo um sinal analógico em um sinal digital com um número específico de bits. Da mesma forma, os valores associados a cada valor de tensão serão únicos. O sinal analógico pode nunca ser representado com exatidão; há algum erro, embora este diminua à medida que mais bits são usados na codificação. Característica de conversão de um conversor A/D de três bits Barramentos de sistemaEstas são as linhas de conexão elétrica pelas quais as informações trafegam no sistema. Existem três tipos de barramentos: Barramento de dados : Este barramento interconecta todas as unidades do sistema e é bidirecional, permitindo tanto a leitura quanto a escrita de informações. O número de linhas deve ser igual ao número de bits do dado. Barramento de endereços : usado para indicar o endereço de memória (RAM, ROM ou unidade de entrada/saída) que deve ser lido ou gravado. Barramento de controle : determina qual unidade deve enviar e/ou receber cada dado do microprocessador e também sincroniza a transmissão de dados no sistema.
-
Circuitos digitais são usados para criar dispositivos que permitem automatizar um ou mais processos, chamados controladores . Esses controladores são compostos por diferentes circuitos lógicos, que muitas vezes requerem muitos componentes usados para uma única aplicação, dando origem ao que é conhecido como lógica com fio . Com o advento dos microprocessadores , tornou-se possível ter um grande número de circuitos em um único componente, sem a necessidade de modificar nenhuma das conexões internas, graças à programação adequada. Esse tipo de trabalho é chamado de lógica programada e é atualmente utilizado em quase todos os dispositivos eletrônicos, incluindo as unidades de controle dos veículos. MicroprocessadorTrata-se de um circuito de integração em larga escala (LSI) composto por outros circuitos mais simples inseridos em um único circuito integrado. Todos esses componentes são conhecidos como hardware do microprocessador . Para executar as diferentes funções sem modificar esse hardware, uma série de instruções que o microprocessador obedece são programadas. Esses comandos constituem a linguagem usada para se comunicar com o microprocessador, chamada de software . Exemplo de diferentes microprocessadores Um microprocessador é composto por diferentes elementos que lhe permitem funcionar. Esses elementos são: Unidade lógica aritmética (ULA)Este é composto por diferentes circuitos combinacionais e é responsável por realizar operações aritméticas e lógicas (comparações). Ele recebe dados da unidade de controle indicando a operação a ser realizada. Após a operação ser realizada, eles são armazenados em um registrador. As linhas de controle (bits) determinam a operação a ser realizada; quanto mais linhas ele puder receber, mais funções terá. Várias ALUs especializadas em diferentes operações complexas são frequentemente instaladas, às vezes chamadas de coprocessador matemático . RegistrosEles armazenam os resultados da execução das instruções e possibilitam carregar ou armazenar dados de uma memória externa. Quanto mais bits um registrador puder armazenar, maior será a capacidade e a velocidade de execução do processador. Quando um microprocessador é de 4, 8, 16, 32 ou 64 bits, isso se refere ao tamanho de seus registradores. Unidade de controleA unidade de controle é responsável pelo controle e execução de todas as operações, como recuperar instruções da memória, decodificá-las e interpretá-las ou executá-las. Para realizar essas funções, a unidade é composta pelos seguintes dispositivos: Contador de programa : Contém o endereço da próxima instrução a ser executada e permite a leitura sequencial da memória. Registro de instruções : Memoriza a instrução que será executada naquele momento, aguardando que ela seja decodificada, preparada e executada. Decodificador : Interpreta o código da instrução e envia os comandos pertinentes aos demais dispositivos para executá-los. Sequenciador : Gera os comandos para executar todas as instruções do registrador passo a passo. Composição básica da unidade de controle RelógioComposto por um oscilador de cristal, permite gerar um sinal de sincronização. Este sinal é usado para coordenar todas as atividades e funções do microprocessador. Com o tempo, a velocidade do clock aumentou, o que significa que mais instruções por segundo (GHz) podem ser executadas. Composição básica de um microprocessador O microprocessador desempenha a função de controle do processo. É frequentemente chamado de CPU (Unidade Central de Processamento) e, juntamente com outros controladores programáveis , possibilita a criação de dispositivos eletrônicos complexos, como computadores.
-
Circuito integradoComo mencionado anteriormente, circuitos integrados são usados para fabricar portas lógicas e são formados por um conjunto de componentes eletrônicos, como resistores, diodos, transistores, etc. Esses componentes são integrados em uma única peça de material semicondutor e são encapsulados. Com o passar do tempo e a evolução desses dispositivos, os circuitos integrados são equipados com um número cada vez maior de portas lógicas, permitindo-lhes executar funções cada vez mais complexas. Dependendo das necessidades, os circuitos integrados são fabricados em diferentes encapsulamentos para permitir a conexão ao circuito ao qual se destinam. Diferentes tipos de encapsulamentos de circuitos integrados Os circuitos integrados podem ser classificados de acordo com sua escala de integração, sendo essa escala o número de portas lógicas que compõem o circuito em questão. Essa classificação é a seguinte: SSI : Integração em pequena escala, tem pelo menos 12 portas lógicas. MSI : Integração de média escala, tem entre 12 e 99 portas lógicas. LSI : Integração em larga escala, tem entre 100 e 999 portas lógicas. VLSI : Integração em larga escala, tem entre 1.000 e 9.999 portas lógicas. ULSI : Integração em ultra larga escala, tem entre 10.000 e 99.999 portas lógicas. GSI : Integração Gigascale, possui mais de 100.000 portas lógicas. Um circuito MSI, por exemplo, permite executar tarefas simples específicas, enquanto um circuito integrado GSI pode executar um grande número de tarefas, como no caso do processador de um computador. Parâmetros principais de um circuito integradoOs parâmetros mostrados abaixo são os mais importantes em um circuito integrado. Esses parâmetros especificam as características dos circuitos e permitem determinar seus valores funcionais. Os parâmetros mais relevantes são: Tensão de alimentaçãoPara que os circuitos funcionem, é necessária uma fonte de corrente contínua que garanta a corrente mais estável possível. O positivo é normalmente fornecido ao pino rotulado V DC, enquanto o negativo é fornecido ao pino GND . Níveis de tensão de entrada e saídaA tensão de entrada indica o valor de tensão necessário na entrada de uma porta lógica para que ela a reconheça como nível lógico alto (1) ou nível lógico baixo (0). Os níveis de tensão de entrada são: V IL(máx.) : Este é o valor máximo de tensão de entrada (I) que o gate interpretará como nível baixo (L) ou "0". V IH(min) : Este é o valor mínimo de tensão de entrada (I) que o gate interpretará como nível alto (H) ou "1". Da mesma forma, como as portas lógicas estão interconectadas, a tensão de saída fornecida por uma porta para cada um dos níveis lógicos deve ser conhecida, a fim de garantir a capacidade de ativação das portas lógicas conectadas atrás dela. Os níveis de tensão de saída são: VOL (máx.) : Este é o valor máximo de tensão de saída (O) que o gate interpretará como nível baixo (L) ou "0". V OH(min) : Este é o valor mínimo de tensão de saída (O) que o gate interpretará como nível alto (H) ou "1". Gráficos dos níveis de tensão de um circuito integrado Imunidade ao ruídoO termo ruído refere-se a interferências ou variações indesejadas de tensão, que podem ser causadas por grandes flutuações de tensão ou campos eletromagnéticos induzidos na instalação elétrica. A imunidade a ruídos é a capacidade de tolerar ruídos sem alterar os valores lógicos de saída, e quanto maior a tolerância de um circuito, melhor. As margens para níveis alto e baixo podem ser calculadas da seguinte forma: Margem de ruído para alto nível: VNH=VOH(min)−VIH(min) Margem de ruído para nível baixo: VNL=VIL(max)−VOL(max) Dissipação de energiaDurante a operação, um circuito lógico consome uma certa quantidade de energia elétrica. Isso faz com que os circuitos aqueçam devido ao efeito Joule, podendo danificar os dispositivos eletrônicos se a temperatura for excessiva. Uma das características de um circuito é essa dissipação de potência (mW) por cada porta lógica do circuito, com circuitos melhores dissipando menos potência e transformando-a em calor. Capacidade de carga (fan-out)Um circuito lógico normalmente possui várias entradas de portas lógicas conectadas às saídas de outras. Como a tensão de saída fornecida é limitada, o uso de mais portas lógicas conectadas a uma saída de sinal do que o suportado pode causar a falha de algumas delas. A capacidade de carga, ou fan-out, indica o número máximo permitido de portas que podem ser conectadas a cada saída, sendo que circuitos integrados de melhor qualidade têm maior capacidade. Fan-out de 6 para a saída de uma porta inversora Atraso de propagaçãoEste é o tempo decorrido quando uma porta lógica altera o nível de saída devido a um sinal de entrada. Esse atraso, medido em nanossegundos (ns), limita o funcionamento da porta lógica. Isso modifica a frequência máxima do sinal que o circuito integrado pode suportar. Quanto menor o atraso de propagação, maior a frequência de operação que o circuito pode suportar e melhor será sua resposta. Atraso de propagação de uma porta lógica OR
-
Portão NORO funcionamento desta porta lógica é o oposto do da porta OU , portanto, do ponto de vista funcional, ela é composta pela combinação de uma porta OU e uma porta inversora. Esta porta lógica possui múltiplas entradas para uma única saída e sua função pode ser expressa da seguinte forma: S=A+B¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Representação da porta lógica NOR e sua tabela verdade Supondo que existam duas entradas, a saída será "1" somente quando as entradas forem "0". Caso contrário, a saída permanecerá "0". Isso pode ser representado eletricamente da seguinte forma: Representação elétrica da porta NOR Porta NANDÉ composto pela combinação de uma porta AND e uma porta inversora, produzindo um funcionamento inverso ao da porta AND . Esta porta possui múltiplas entradas e uma saída, e sua função é expressa da seguinte forma: S=A×B¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Representação da porta lógica NAND e sua tabela verdade Se o portão tiver duas entradas, a saída será "1" enquanto uma das entradas for "0". Se todas as entradas forem "1", o valor de saída desta função será "0". Esta função, representada como um circuito elétrico, é: Representação elétrica da porta NAND Porta OU exclusiva (XOR)Esta é uma porta lógica com múltiplas entradas e uma saída, na qual o valor de saída será alto somente se uma de suas entradas for alta. Se mais de uma entrada for alta, ou todas as entradas forem baixas, a saída também será baixa. A função que expressa esta função é: S=A⊕B No caso em que esta porta possui duas entradas, somente se uma delas for "1" a saída também será "1". Caso contrário, se ambos os valores de entrada forem "1" ou "0", o valor de saída será "0". A equação, a representação e a tabela-verdade para a porta OU exclusiva são as seguintes: Representação da porta lógica XOR e sua tabela verdade Porta NOR exclusiva (XNOR)Formada pela combinação de uma porta OU exclusiva e uma porta invertida, a porta XNOR funciona de forma inversa à da porta lógica XOR . A função desta porta lógica é a seguinte: S=A⊕B¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Se a porta XNOR tiver duas entradas, somente quando ambas tiverem o mesmo valor ("0" ou "1") a saída resultante será "1". Caso contrário, se um dos valores de entrada for diferente do outro, o valor de saída será "0". A equação, a representação e a tabela-verdade para a porta OU exclusiva são as seguintes: Representação da porta lógica XNOR e sua tabela verdade
-
Portão OUA porta lógica OU é uma porta com múltiplas entradas. Se duas entradas forem utilizadas, a saída obtida será alta (1) quando qualquer uma de suas entradas também for alta, e a saída será baixa (0) somente quando ambas as entradas forem baixas. A tabela verdade de uma porta lógica com duas entradas possui 4 (2 2 ) combinações possíveis, e uma com três entradas possui 8 (2 3 ) combinações, e assim por diante. Cada porta lógica, também conhecida como porta de adição , é expressa da seguinte forma: S=A+B Representação da porta OU junto com sua tabela verdade A interpretação desta porta lógica é que a saída S será verdadeira (1) quando qualquer uma das entradas A ou B for verdadeira. Esta interpretação pode ser extrapolada para um circuito elétrico que utiliza botões normalmente abertos, em que um botão aberto corresponde a um nível baixo e um botão fechado corresponde a um nível alto. Representação elétrica da porta lógica OU E PortãoAssim como a porta OU, esta porta lógica possui várias entradas. Neste caso, a porta lógica E só terá uma saída alta (1) quando todas as suas entradas também forem altas. Se qualquer uma das entradas for baixa (0), independentemente das demais entradas, a saída será baixa. Esta porta lógica, também conhecida como porta de produto , é expressa da seguinte forma: S=A×B Representação da porta AND junto com sua tabela verdade A interpretação desta porta lógica é que a saída S será verdadeira (1) quando ambas as entradas A e B forem verdadeiras. Se representarmos esta lógica como um circuito com botões, o circuito seria: Representação elétrica da porta lógica AND Porta inversora (NÃO)Ao contrário das portas lógicas descritas até agora, a porta inversora possui apenas uma entrada. A saída obtida nesta porta será sempre o estado oposto ao estado da entrada, de modo que se a entrada for alta (1), a saída será baixa (0), e vice-versa. A equação, a representação e a tabela-verdade para esta porta lógica são as seguintes: S=Ā Representação da porta do inversor junto com sua tabela verdade A interpretação desta porta lógica é que a saída S será verdadeira (1) quando a entrada A for falsa (0), possibilitando a conversão de "0" para "1" e de "1" para "0". Ela pode ser usada em conjunto com outras portas lógicas para inverter suas funções. Em um circuito elétrico, esta porta lógica se comportaria como um botão normalmente fechado, agindo da seguinte forma: Representação elétrica da porta lógica do inversor
-
Níveis lógicosEm eletrônica, existem apenas dois estados possíveis: verdadeiro ou falso, sim ou não, 1 e 0. Para converter essas informações em impulsos elétricos, cada um desses níveis lógicos ou estados deve receber um valor de tensão elétrica. Isso significa que dois tipos de lógica podem ser aplicados: Lógica positiva : nesta lógica, "1" é atribuído a um valor de alta tensão ( H igh) enquanto "0" é atribuído a um valor baixo ( L ow). Lógica negativa : neste caso, "1" é igual a um valor de tensão baixo ( L ow), enquanto "0" é igual a um valor alto ( H igh). Atribuição de níveis lógicos em uma lógica positiva O tipo de lógica utilizada em cada caso dependerá da que melhor se adapta ao projeto do circuito. A representação gráfica dos dois níveis lógicos é a onda quadrada típica, tão frequentemente utilizada em veículos automotores, para comunicação entre unidades, transmissão de informações por determinados sensores e controle de alguns atuadores pela unidade de controle. Representação gráfica dos dois níveis lógicos Circuitos lógicosOs circuitos lógicos surgiram da necessidade de criar CLPs, antes mesmo da eletrônica digital integrada. Uma das primeiras aplicações foi em centrais telefônicas. Eles substituíram relés eletromagnéticos por portas lógicas integradas em um chip, evitando a necessidade de manutenção e reduzindo o espaço necessário. Componentes básicos, chamados portas lógicas, são utilizados para executar as diferentes funções fundamentais. Essas funções são possíveis graças a circuitos integrados e consistem em diferentes entradas, gerando uma única saída. Um de dois estados possíveis é aplicado às diferentes entradas, obtendo-se um estado de saída que depende do tipo de porta utilizada. Diferentes estados de saída podem ser obtidos a partir do mesmo estado de entrada se uma porta lógica diferente for usada, com as combinações possíveis de cada porta lógica representadas em uma tabela verdade . Exemplo de tabela verdade de uma porta lógica Utilizando portas lógicas, é possível criar circuitos lógicos. Existem dois tipos: Circuitos combinacionais : são circuitos onde as saídas dependem exclusivamente dos níveis lógicos de entrada, sendo que estes valores variam em função das portas lógicas que os compõem. Circuitos sequenciais : são circuitos que não apenas variam suas saídas com base nos valores de entrada, mas também no estado do sistema, que também depende dos valores de entrada anteriores. Isso significa que esses circuitos possuem memória e podem armazenar os valores anteriores. SímboloDois sistemas diferentes de símbolos são usados para representar portas lógicas. Embora os símbolos tradicionais tenham sido usados por muito tempo e ainda estejam em uso, um novo padrão foi criado em 1984, utilizando símbolos ANSI . Como ambos os símbolos são usados para representar portas lógicas, cada porta lógica será mostrada com ambos os símbolos abaixo.
-
Sistemas de numeração IISistema octalO sistema octal é um sistema de base 8 que utiliza os dígitos de 0 a 7. Este sistema é considerado um sistema binário abreviado devido à simplicidade da conversão entre eles, que pode ser feita rapidamente. Por esse motivo, este sistema é frequentemente usado para representar informações binárias de forma compacta em sistemas digitais. Para converter um número octal em binário, basta substituir cada dígito octal pelos três bits que correspondem ao valor em questão. Tabela de equivalência entre os sistemas octal e binário Usando a tabela, é fácil converter de octal para binário e de binário para octal, como mostrado abaixo. O agrupamento do número binário em três para convertê-lo em octal é feito do final (direita) para o início (esquerda), então se o número binário não for múltiplo de 3, um ou dois “0” são adicionados à esquerda (conforme necessário) para formar um grupo final de 3 bits. Sistema hexadecimalEste é um sistema de base 16 e tem 10 dígitos numéricos e 6 caracteres alfabéticos, usando os números de 0 a 9 e as letras A, B, C, D, E e F. Assim como no sistema octal, cada símbolo no sistema corresponde a uma combinação de bits, embora neste caso, 4 bits sejam usados para cada caractere em vez de 3. A correspondência entre o sistema hexadecimal e o sistema binário é a seguinte. Tabela de equivalência entre os sistemas decimal, hexadecimal e binário Assim como na conversão entre octal e binário, a conversão entre hexadecimal e binário é feita da seguinte maneira: Assim como no sistema octal, os grupos de 4 bits são formados da direita para a esquerda, adicionando-se o “0” correspondente à esquerda se houver bits faltando no primeiro grupo, para formar os 4 bits.
-
Sistemas numéricosUm sistema numérico é entendido como um conjunto ordenado de símbolos ou dígitos e as regras aplicadas para combiná-los e representar um valor ou quantidade numérica. Existem diferentes sistemas que são identificados por sua base. A base de um sistema numérico é o número de dígitos diferentes que são usados no sistema em questão, sendo um dígito entendido como qualquer símbolo que não seja composto de uma combinação de outros e represente um número inteiro positivo. Os sistemas numéricos permitem gerar a codificação utilizada no sistema digital. O sistema binário é o mais adequado para sinais digitais, pois pode criar qualquer codificação a partir de dois estados (sim ou não, "0" ou "1"). Nesta seção, além do sistema binário, abordaremos outros sistemas numéricos utilizados, incluindo os sistemas decimal, octal e hexadecimal, bem como a conversão desses sistemas para o sistema binário. Sistema decimalNo sistema decimal, são utilizados dez dígitos diferentes — 0, 1, 2, 3, 4, 5, 6, 7, 8 e 9 — e é um sistema de base 10. Este é o sistema numérico mais utilizado na vida cotidiana e em cálculos matemáticos. No entanto, para outras aplicações, como em eletrônica, outros sistemas são utilizados. Nesse sistema, cada número determina um valor com base na posição que ocupa. Se analisarmos o número 562, por exemplo, ele pode ser decomposto da seguinte forma: 562=500+60+2=5×100+6×10+2×1 A expressão polinomial seria: 5×102+6×101+2×100 Isso significa que qualquer número pode ser decomposto multiplicando cada dígito pela base elevada ao número que representa a posição que ele ocupa. A expressão polinomial de um sistema decimal é: N10=ax×10x+⋅⋅⋅+a2×102+a1×101+a0×100 O termo N 10 representa o número em base decimal, enquanto os termos a x , a 2 , etc, representam o dígito numérico (de 0 a 9) em suas respectivas posições. Sistema binárioO sistema binário é um sistema de base 2, usando apenas os dígitos "0" e "1" para cobrir qualquer valor. No sistema binário, o termo bit é usado para definir um dígito binário. Um sistema de codificação que usa 8 bits, como o discutido abaixo, pode definir um valor máximo (decimal) de 255. Valor das posições de um número de 8 bits e seu valor decimal A expressão polinomial que representa o sistema binário é a seguinte: N2=ax×2x+⋅⋅⋅+a2×22+a1×21+a0×20 O termo N 2 representa o número em base binária, enquanto os termos a x , a 2 , etc, representam o dígito numérico ("0" e "1") em suas respectivas posições. A expressão polinomial acima pode ser usada para converter qualquer número binário em decimal. O exercício a seguir converterá o número binário 11001 em decimal. 110012=1×24+1×23+0×22+0×21+1×20 =1×16+1×8+0×4+0×2+1×1=2510 Para converter um número decimal em binário, ele deve ser dividido por 2, continuamente, até que o quociente da divisão seja 0. Os restos obtidos dessa divisão durante as diferentes etapas constituem o número binário resultante. A conversão do número decimal 171 para binário seria feita da seguinte forma:
-
Introdução à eletrônicaA eletrônica é o ramo da física e da engenharia que estuda e utiliza sistemas cujo funcionamento se baseia na condução e no controle do fluxo de elétrons ou outras partículas eletricamente carregadas. A eletrônica pode ser dividida em dois grupos: eletrônica analógica e eletrônica digital . Eletrônica analógicaBaseia-se no processamento de sinais elétricos analógicos. O termo analógico expressa uma presença contínua ao longo do tempo. Aplicado a um sinal elétrico, significa que o sinal é contínuo, mesmo que seus valores de tensão ou corrente mudem. Um exemplo de sinal analógico seria o sinal gerado por um potenciômetro. Este dispositivo gera um sinal linear proporcional à posição de um limpador de para-brisa, cujo valor de tensão nunca será 0. Sinal analógico gerado por um potenciômetro Os sinais analógicos assumem um valor instantâneo indefinido que pode ser diferente para cada fração de tempo, reproduzindo assim com precisão a grandeza física da qual se originam. Eletrônica digitalNeste caso, a eletrônica digital baseia-se no processamento de sinais digitais. Um sinal digital , em vez de ser composto por valores indefinidos para cada fração de tempo, é composto por valores ou estados predefinidos, chamados níveis lógicos, em determinados intervalos de tempo. A cada nível lógico são atribuídos os valores "0" e "1" (valor binário), permitindo que um sinal elétrico seja convertido em digital ou binário usando um conversor analógico-digital (ADC). Os sinais digitais também podem ser convertidos novamente em sinais analógicos por um conversor digital-analógico (DAC). Sinal digital convertido usando o sinal de um switch O uso do termo “digital” começou com o código Morse, que pode ser considerado o primeiro método de transmissão de sinais em formato digital. A vantagem de usar sinais digitais em vez de sinais analógicos reside na capacidade de armazenar, processar e transmitir dígitos ou valores com segurança, pois é muito mais difícil que o significado desse sinal seja perturbado por interferência externa. A tensão dos sinais analógicos pode ser perturbada ou modificada por interferência eletromagnética, o que, na verdade, modifica o significado da informação do sinal. Os sinais digitais, por outro lado, conseguem manter o mesmo valor de "0" ou "1" mesmo que o valor real da tensão elétrica varie ligeiramente, mantendo o significado intacto.
-
Relés de Acoplamento 12V em Sistemas AutomotivosUm relé automotivo de 12V é um componente eletromecânico usado para acionar cargas elétricas de maior potência (motores, bomba de combustível, eletroventilador, faróis, faroletes, etc.) a partir de sinais de baixa potência fornecidos pela unidade de comando (ECU, BCM, BSI ou UCH). 🔹 Funcionamento BásicoO relé possui dois circuitos independentes: Circuito de comando (bobina): formado pelos terminais 85 e 86. Quando a ECU envia um sinal negativo (massa de comando) no terminal 85, a bobina do relé é energizada. O outro lado da bobina (terminal 86) recebe +12V pós-chave. Isso cria um campo magnético que fecha os contatos internos. Circuito de potência (contatos): formado pelos terminais 30 e 87. O terminal 30 recebe +12V direto da bateria (via fusível). Quando o relé é acionado, o contato fecha, enviando +12V pelo terminal 87 para alimentar o atuador. 📌 Dessa forma, a ECU controla com baixo consumo de corrente um circuito de alta corrente, protegendo a unidade de comando e garantindo confiabilidade. 🔹 Aplicações ComunsBomba de combustível → relé aciona a bomba apenas durante partida e funcionamento. Eletroventilador → relés de baixa e alta velocidade, controlados por sinal negativo da ECU. Motores auxiliares → como vidro elétrico, teto solar, limpadores. Iluminação → faróis, faroletes, lanterna traseira. 🔹 Defeitos ComunsContatos soldados: relé trava fechado, atuador permanece ligado mesmo sem comando. Bobina aberta ou em curto: relé não aciona. Mau contato interno: funcionamento intermitente de bomba, ventoinha ou faróis. Oxidação nos terminais: queda de tensão no atuador. 🔹 Testes PráticosTeste de acionamento: aplicar +12V em 86 e negativo em 85 → deve ouvir o “clique” do relé. Teste de continuidade: com o relé acionado, medir entre 30 e 87 → deve haver continuidade. Teste de queda de tensão: energizar o relé no veículo e medir a tensão no terminal 87 → deve estar próxima a 12V. 🔹 Mapa Mental SimplificadoAlimentação: +12V direto da bateria (terminal 30). Comando: ECU fornece negativo (terminal 85). Bobina: fechando circuito entre 85 e 86. Saída: +12V do terminal 87 para o atuador. Atuador: motor, bomba, lâmpada, etc. 🔹 Perguntas dos Alunos TAPAPergunta: Por que os módulos automotivos enviam sinal negativo para o relé, em vez de positivo? Resposta: Porque é mais seguro e econômico. O módulo precisa apenas aterrar o terminal da bobina (85), evitando que circule corrente alta pelo circuito interno da ECU. Além disso, reduz riscos de curto-circuito interno. Pergunta: Como diferenciar um defeito no relé de um defeito no atuador (ex: bomba de combustível)? Resposta: Deve-se medir a tensão no terminal 87. Se o relé aciona mas não há tensão, o defeito está nele. Se há tensão no 87, mas a bomba não funciona, o defeito está na bomba ou no chicote.
-
Óptico / VisualConceitos básicosSão atuadores que fornecem uma representação visual para diferentes aplicações, tanto para entretenimento dos passageiros quanto para informações ao motorista. O funcionamento desse tipo de dispositivo se baseia na permissão ou não de passagem de luz pela tela, o que permite a criação de formas e símbolos graças a uma matriz de pontos. Na maioria dos casos, esses atuadores são telas de cristal líquido, ou LCDs . Os LCDs são compostos pelos seguintes elementos: Composição interna de um LCD Esses displays funcionam graças às propriedades do cristal líquido posicionado entre os dois filtros polarizados. Esses filtros são dispostos a 90° entre si, de modo que a luz polarizada do primeiro filtro precisa girar 90° para passar pelo segundo filtro; caso contrário, a luz é refletida e o cristal fica completamente opaco. Essa rotação é causada pelas moléculas do cristal líquido, que são torcidas para formar uma estrutura em hélice. Essa estrutura do cristal permite que a luz gire, sendo polarizada pelo primeiro filtro, mas passando pelo segundo. O cristal líquido recebe energia elétrica por meio de eletrodos, forçando suas moléculas a girar e se alinhar. Dependendo da voltagem aplicada, o cristal se alinha mais ou menos, variando assim a quantidade de luz que consegue passar pelo segundo filtro. Dependendo do filtro de cor utilizado, podem ser criadas telas compostas por pixels monocromáticos ou coloridos. Telas coloridas são compostas por três filtros de cor (vermelho, verde e azul) em cada pixel. Ao variar a luz que passa por cada filtro de cor, o olho humano distingue uma cor específica para cada um dos pixels da tela. AplicaçõesPainel de instrumentosO uso de pequenos LCDs (normalmente monocromáticos) incorporados ao painel é muito comum para fornecer informações ao motorista. Nos primeiros modelos, esses displays eram usados para indicar o número total e parcial de quilômetros percorridos pelo veículo. Sua aplicação se expandiu ao longo do tempo e agora exibem diferentes tipos de informações, como o consumo de combustível ou o status do veículo, além de possibilitar o design de painéis de instrumentos totalmente digitais. Painel de instrumentos equipado com LCD Espelho retrovisor antirreflexoEmbora não sejam displays, os espelhos retrovisores automáticos antirreflexo funcionam de maneira muito semelhante. Este tipo de espelho possui um gel eletroquímico, semelhante ao cristal líquido, entre o vidro do espelho e uma peça transparente de vidro, dois eletrodos, um ou dois sensores fotoelétricos e um sistema eletrônico de controle. Composição de um espelho retrovisor antirreflexo Quando a luz direta incide sobre o espelho, o sensor fotoelétrico captura a luz e envia o sinal para a eletrônica de controle. No caso de espelhos equipados com dois sensores fotoelétricos, a luz recebida pela frente do veículo e a luz da traseira são comparadas para determinar se é luz do dia ou luz de um veículo atrás à noite. A eletrônica de controle avalia os sinais recebidos e envia uma voltagem para o gel eletroquímico por meio dos eletrodos. Essa voltagem faz com que o gel eletroquímico escureça, de modo que, dependendo do grau de ofuscamento capturado, o gel escurecerá mais ou menos, impedindo que a luz reflita no espelho e gere ofuscamento.